
视频教程:手把手带你做开源六足机器人(3D图纸+硬件图纸+软件源码+制作说明书在视频下方自取!)_哔哩哔哩_bilibili
重要提示
1.电池一定要小心接,最好反复确认自己理解了电源部分是怎么接线的,然后再通电;否则不能随便通电,以免短路起火或发生爆炸。
2.对于新手来讲,一定要认真阅读理解本教程,不能一目十行不仔细阅读文字说明只看图片,这将会导致很多步骤理解不到。
3.在碰到不懂且说明书上没有的内容时,一定要善于用百度进行搜索且多多尝试。(也可以在群里问,推荐在群里提问!)
4.如果机器人运行不正常,首先要检查电源,或者将电池充电试试,初学者很容易买到新电池没电了也不知道,所以首先充电保证电量充足,很可能问题就解决了。
-
项目介绍
1.项目介绍
实际上这个机械结构是国外老哥做的一款arduino六足机器人。
这里我们把他改造成arduino版本的,提供更多丰富的功能。目前主要用arduino和ros两种软件平台来做,可以用于学习arduino或者ros编程,同时也可以将ros与arduino结合。
在这个六足机器人的制作中,我们摒弃传统的开发板+舵机驱动板的方式。开发板+舵机驱动板的方式一个方面是集成度不高,杜邦线接线麻烦且可靠性差。另一个方面,两块板子成本加起来也要将近200块,实在是浪费。所以我们自己做了两版舵机驱动板,用esp8266或者esp32做主控,更低的成本,更强大的性能,更丰富的功能且支持WiFi无线遥控,实在是香!他们分别是采用esp8266做主控的Baize_Servo8266和采用esp32做主控的Baize_Servo32,如下图1-1所示:
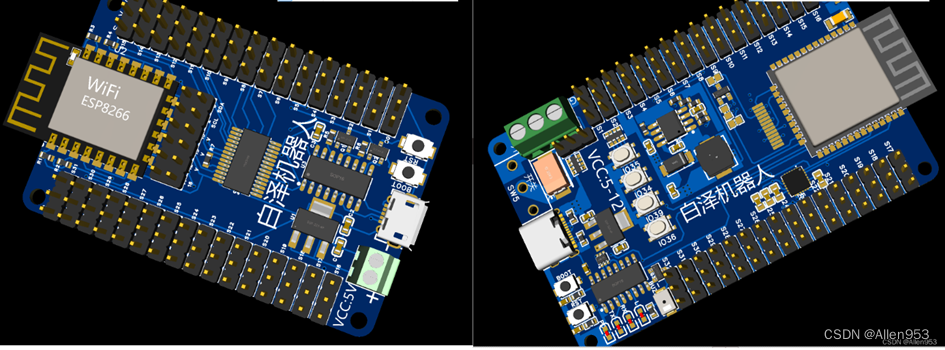
图1-1实物图
这两块儿舵机控制板都是开源的,开原链接如下:
Baize_Servo8266: https://github.com/Allen953/Baize_Servo8266
Baize_Servo32: GitHub - Allen953/Baize_Servo32
Baize_ServoDriver_esp8266或者Baize_ServoDriver_esp32
如图1-2(左)为Baize_ServoDriver_esp8266;图1-2(右)为Baize_ServoDriver_esp32
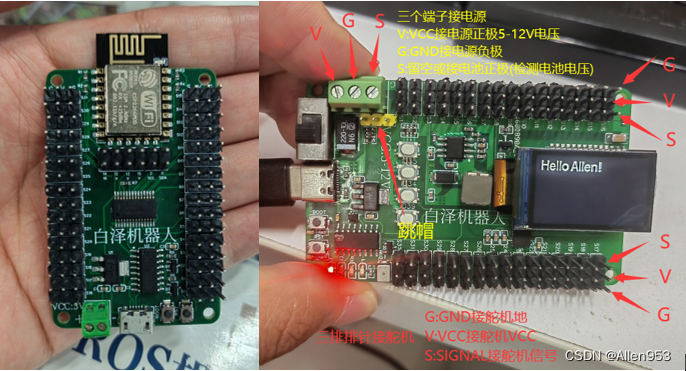
图1-2主控板实物图
建议arduino版六足用Baize_ServoDriver_esp8266而ROS版六足用Baize_ServoDriver_esp32。
我们这里是做arudino版,所以就默认为Baize_Servo8266。
板子接引脚信息如下图所示:
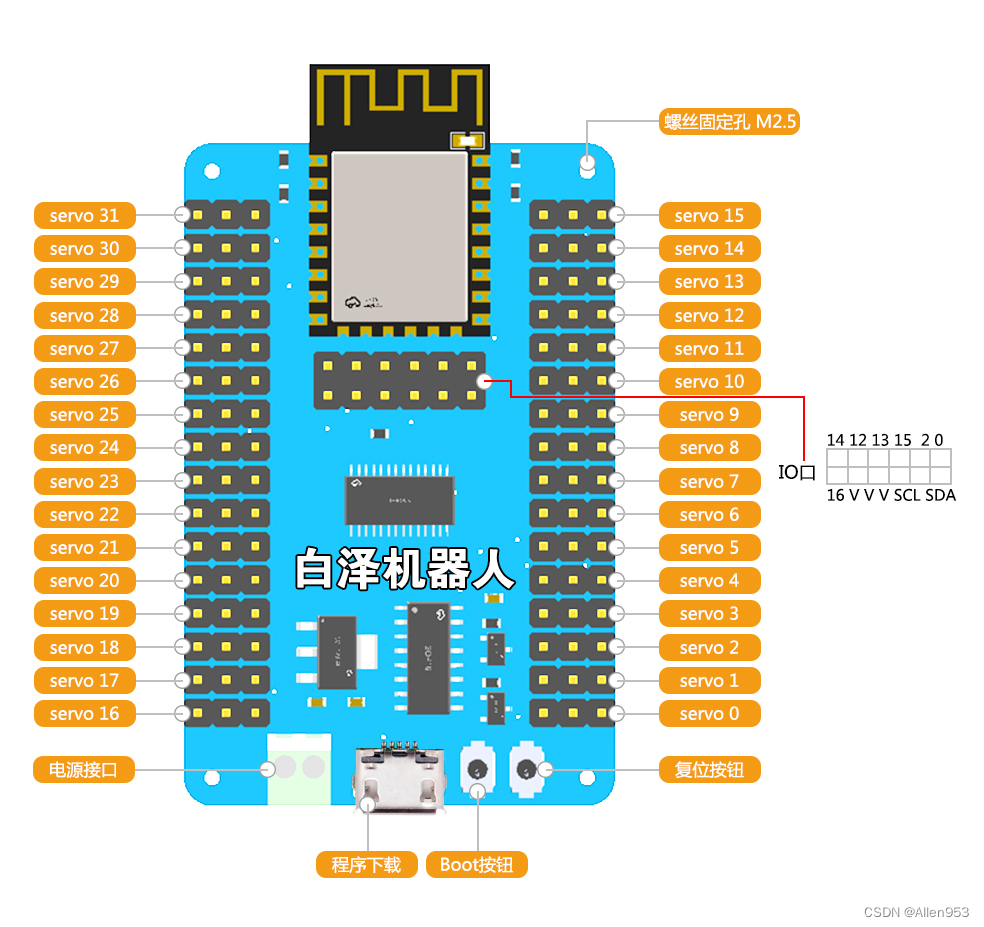
图1-3主控板引脚介绍
机器人组装完外观如图1-4所示:
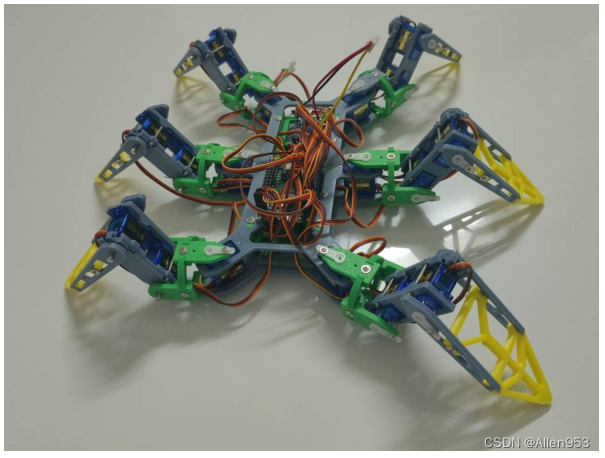
图1-4机器人外观
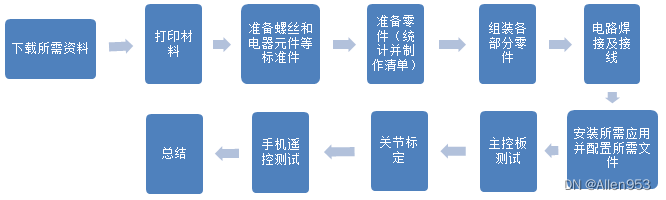
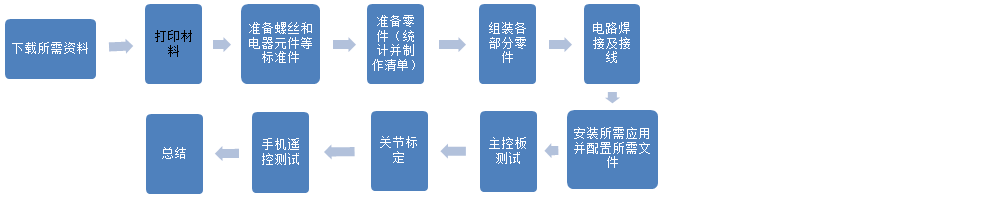
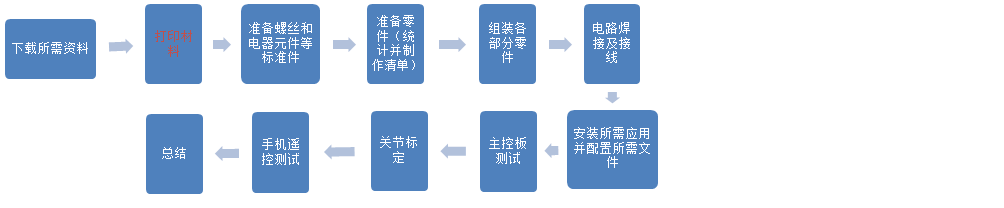
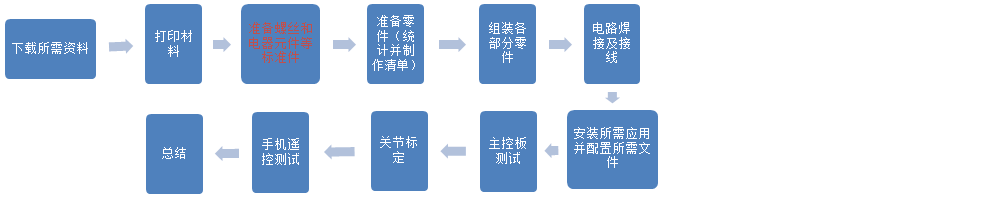
2.制作地图
整个机器人制作流程如下,我们现在在第一步这里(下载所需资料):
3.资料下载
在开始制作该项目前,最好将所有的资料先下载到自己的电脑上,你需要按照以下步骤来下载该项目需要用到的全部资料:
首先访问项目网址:GitHub - Allen953/Baize_H1mini
为了方便访问和下载,我们把仓库同步到了gitee,下载速度更快。
这里是gitee仓库地址:https://gitee.com/li9535/baize_-h1mini
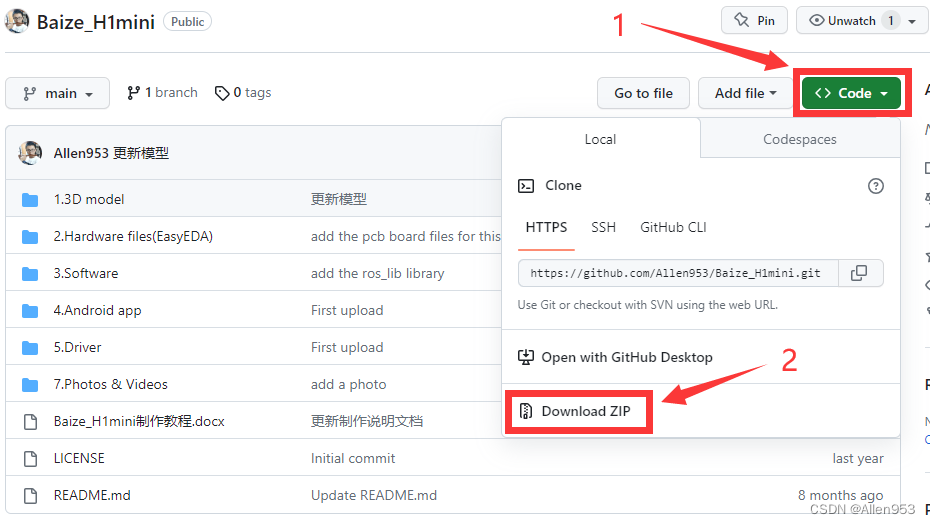
图1-5
接着,你的浏览器会开始下载资料,左下角会出现正在下载的资料压缩包并显示已下载数据大小:
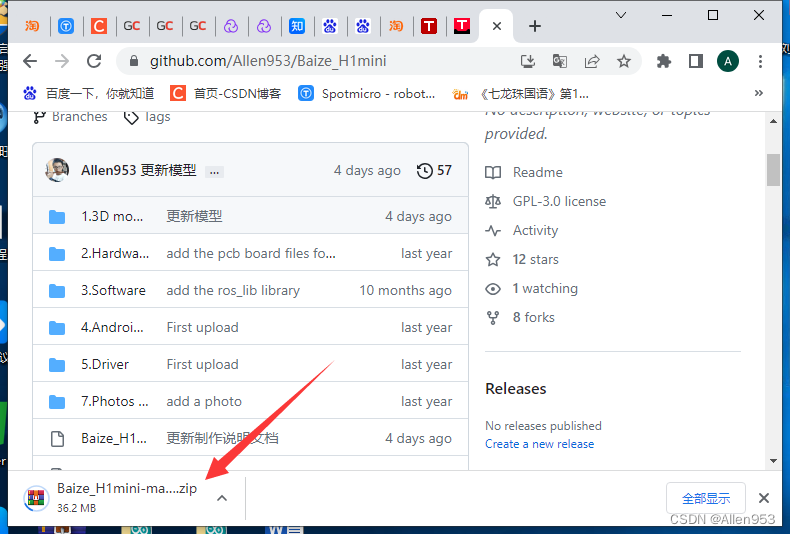
图1-6
耐心等待下载完成并解压压缩包即可提取出完整的数据。
同时,本教程也更新到了CSDN博客上面,如果感觉看PDF不方便的小伙伴,也可以收藏一下这个博客,后续看这个博客也可以哈!
博客链接:https://blog.csdn.net/liuzhitong/article/details/
不过这个pdf文档总是最新的,而博客可能会滞后一些。
4.视频教程
这里有哔哩哔哩视频教程哦!
手把手带你做开源六足机器人(3D图纸+硬件图纸+软件源码+制作说明书在视频下方自取!)_哔哩哔哩_bilibili
如果需要视频教程的小伙伴多,会花时间出更加详细的视频教程。
二.Baize_H1mini机器人零件制作准备
1.制作地图
2.1 solidworks2023安装
安装包百度网盘链接:百度网盘 请输入提取码
密码:1998
操作系统:Windows 10(64位)
处理器:多核64位Intel或AMD处理器
内存:建议4 GB或更高
显卡:支持OpenGL 4.0及以上版本的显卡,建议使用专用显卡
存储空间:至少20 GB的可用硬盘空间
分辨率:建议使用1920 x 1080分辨率或更高
安装教程
软件全版本下载地址(全版本):ps008.top
1.鼠标右击【SolidWorks 2023(64bit)】压缩包选择【解压到 SolidWorks 2023(64bit)】 (win11及以上系统需先点击“显示更多选项”)。
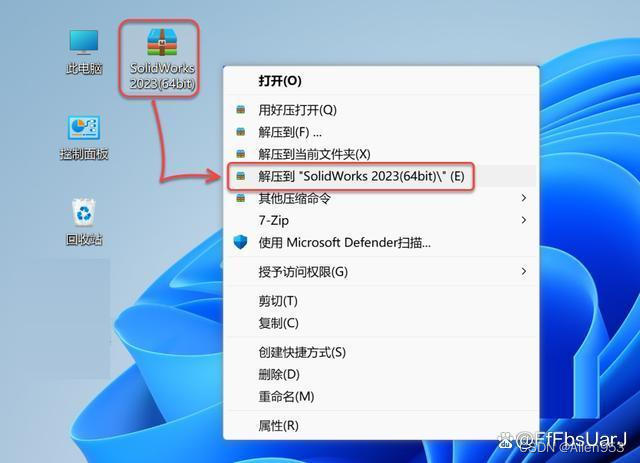
图2-1-1
2.打开解压后的文件夹,双击打开【Crack】文件夹。
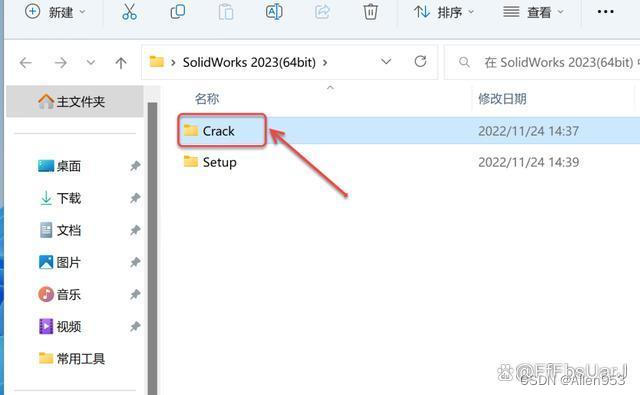
图2-1-2
3.鼠标右击【SolidWorks_Flexnet_Server】文件夹选择【复制】 。
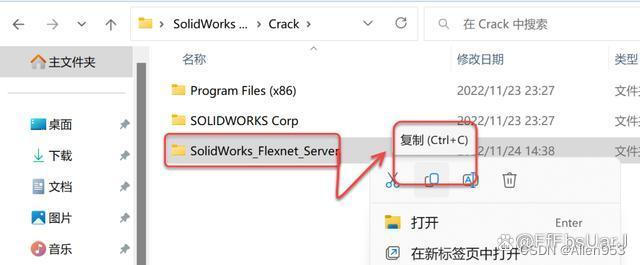
图2-1-3
4.打开电脑C盘,鼠标右击空白处选择【粘贴】 。
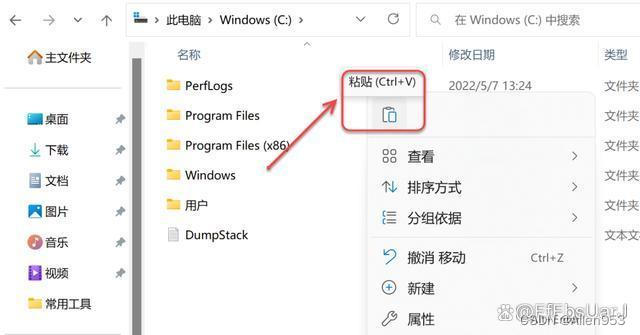
图2-1-4
5.双击打开粘贴后的【SolidWorks_Flexnet_Server】文件夹。
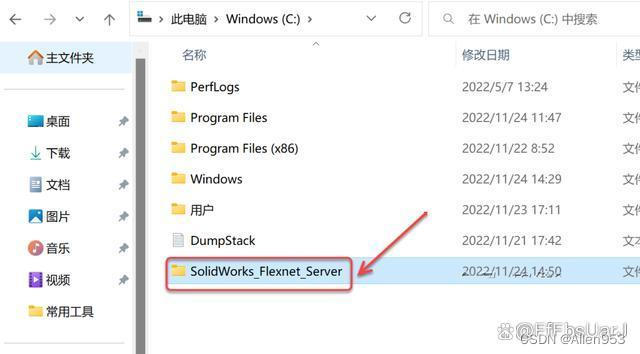
图2-1-5
6.鼠标右击【server_install】选择【以管理员身份运行】。(温馨提示:①运行【server_install】前:先关闭“所有杀毒软件(部分电脑自带的“迈克菲”也要关闭)、防火墙、Windows Defender”,否则可能会被杀毒软件误杀无法运行。若已经没有该文件,需重新解压安装包。)
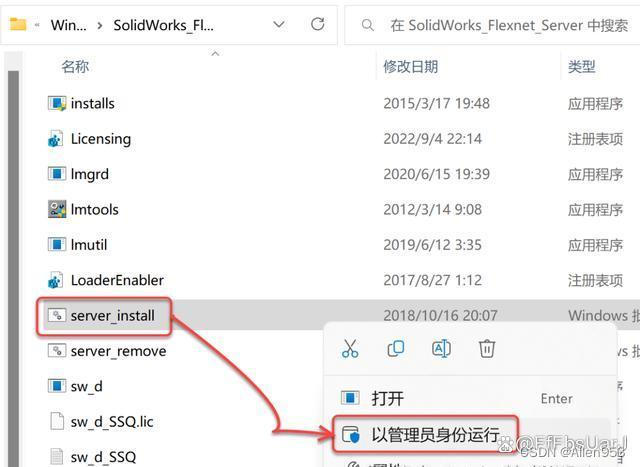
图2-1-6
7.当黑色弹窗界面提示“服务已经启动成功”后点击右上角【X】退出。
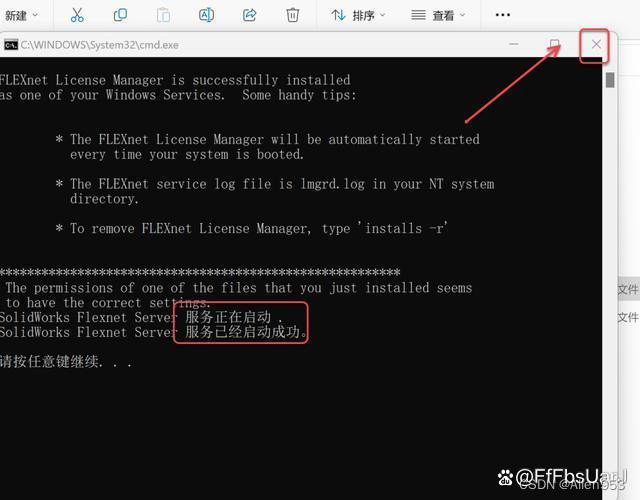
图2-1-7
8.回到【SolidWorks_Flexnet_Server】文件夹,双击运行【LoaderEnabler】。
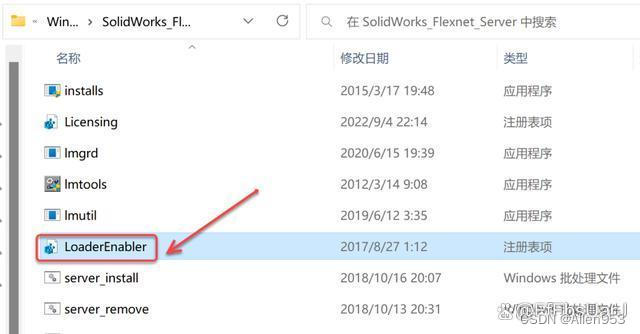
图2-1-8
9.点击【是】。

图2-1-9
10.点击【确定】。
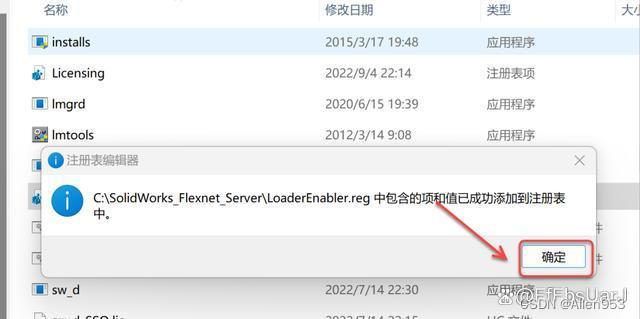
图2-1-10
11.继续回到【SolidWorks_Flexnet_Server】文件夹,双击运行【Licensing】。
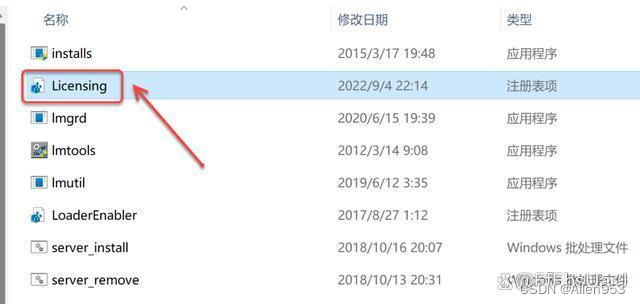
图2-1-11
12.点击【是】。
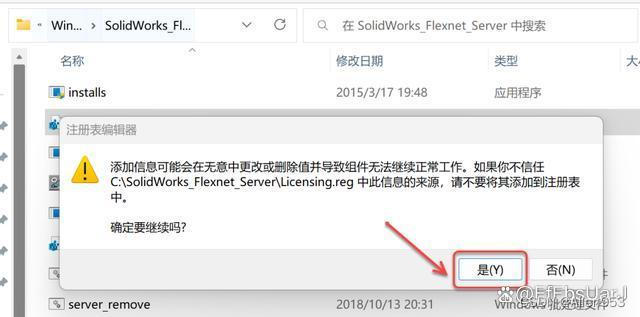
图2-1-12
13.点击【确定】。
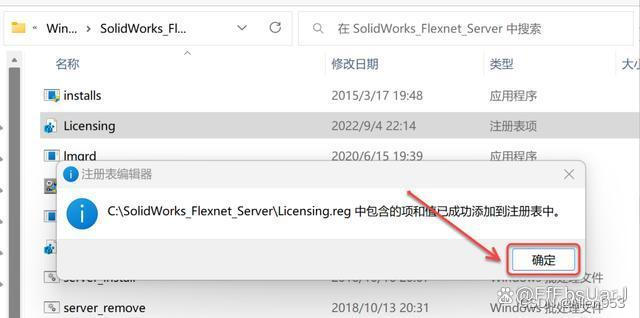
图2-1-13
14.断开电脑网络(关闭WIFI及有线网,安装完成后可连接网络)。

图2-1-14
15.打开安装包解压后的【SolidWorks 2023(64bit)】文件夹,双击打开【Setup】文件夹。
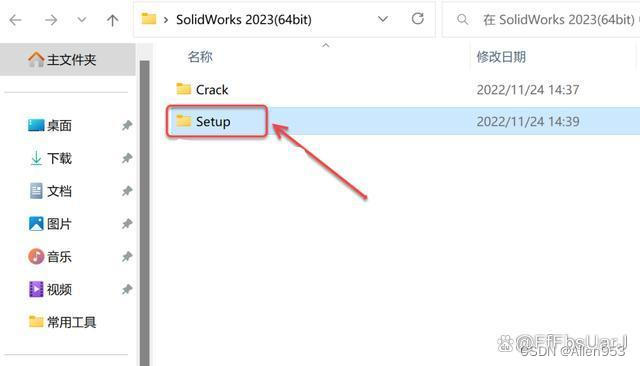
图2-1-15
16.鼠标右击【setup】选择【以管理员身份运行】。
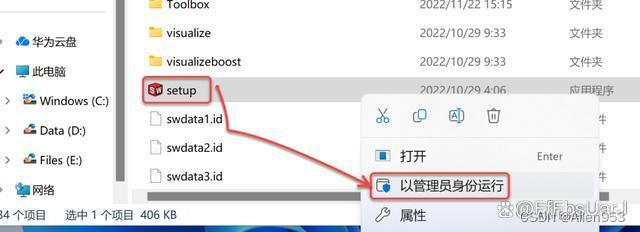
图2-1-16
17.点击【确定】。

图2-1-17
18.点击【下一步】。
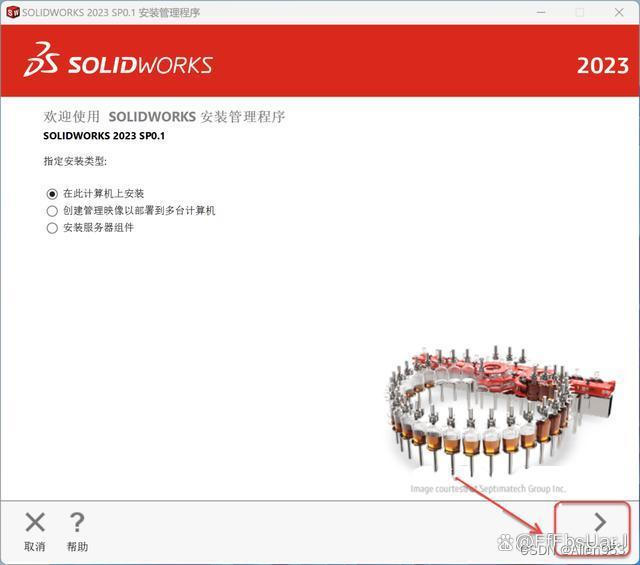
图2-1-18
19.勾选需要安装的模块(产品模块众多,尽量只勾选自己需要的模块),点击【下一步】。
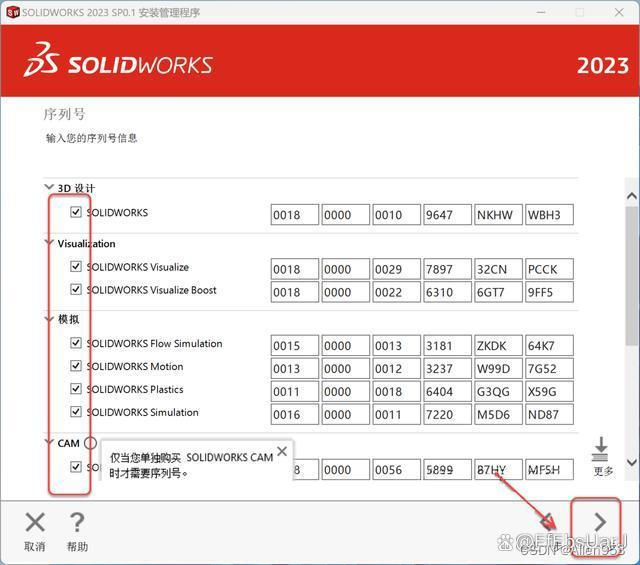
图2-1-19
20.点击【取消】。
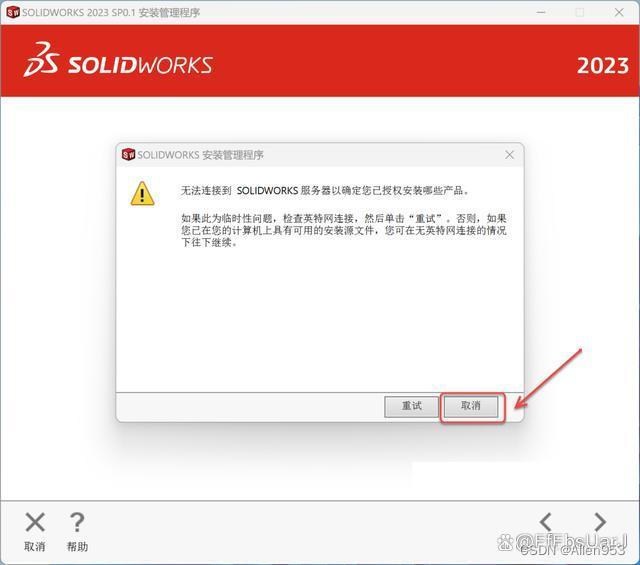
图2-1-20
21.点击“安装位置”右侧的【更改】。

图2-1-21
22.修改路径地址中的首字符C可更改安装位置(如:将C改为E表示安装到E盘,记住修改的磁盘符),点击【返回到摘要】。
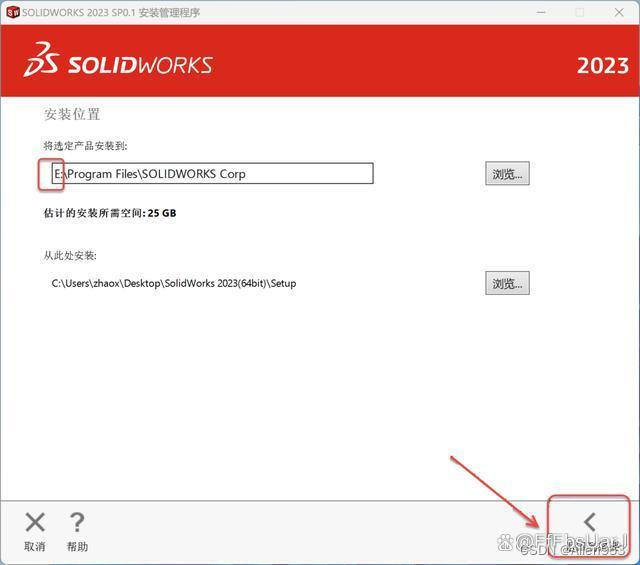
图2-1-22
23.点击“Toolbox/异形孔……”右侧的【更改】。

图2-1-23
24.修改路径地址中的首字符C可更改安装位置(如:将C改为E表示安装到E盘),点击【返回到摘要】。
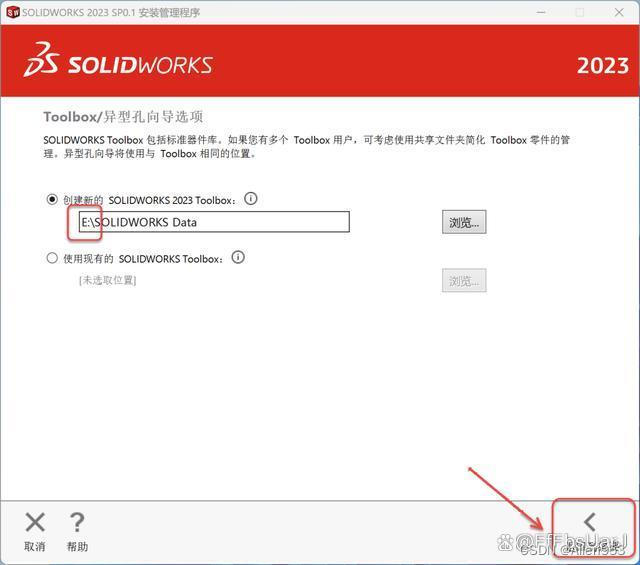
图2-1-24
25.点击“Electrical 选项”右侧的【更改】。
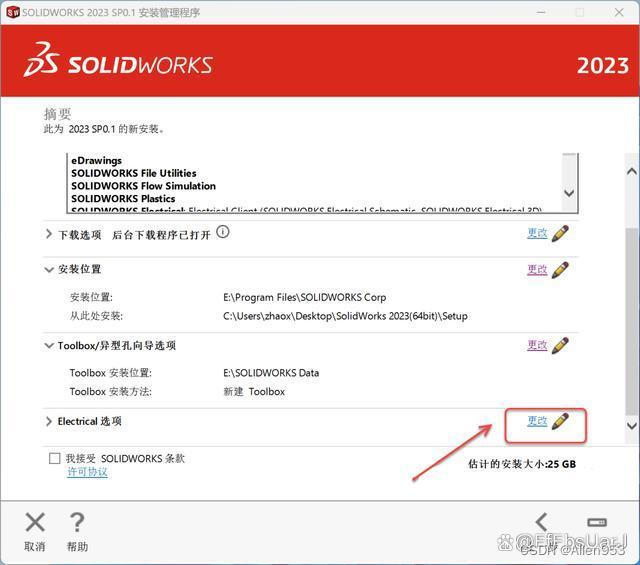
图2-1-25
26.修改路径地址中的首字符C可更改安装位置(如:将C改为E表示安装到E盘),点击【返回到摘要】。
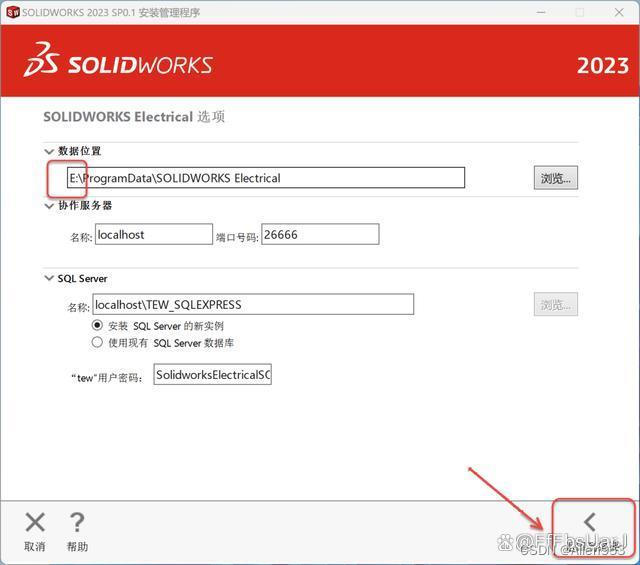
图2-1-26
27.勾选【我接受 SOLIDWORKS 条款】,点击【下一步】。

图2-1-27
28.点击【确定】。

图2-1-28
29.安装中……

图2-1-29
30.取消勾选【为我显示 SOLIDOWRKS 2023……】,选择【不,谢谢】,点击【完成】。
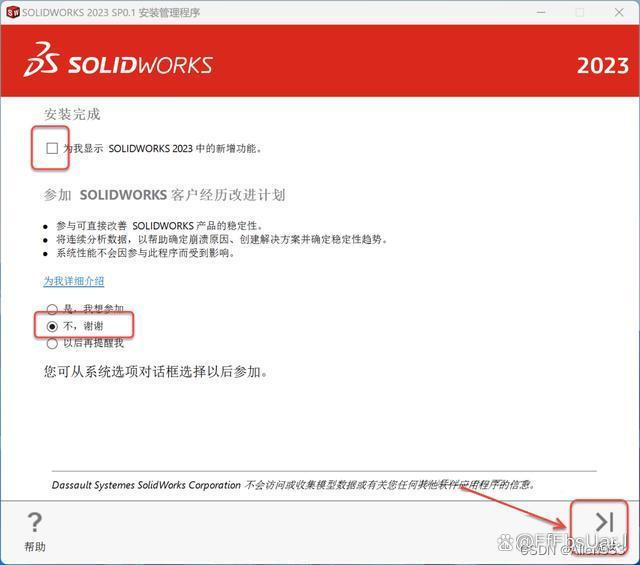
图2-1-30
31.点击【以后重新启动】。
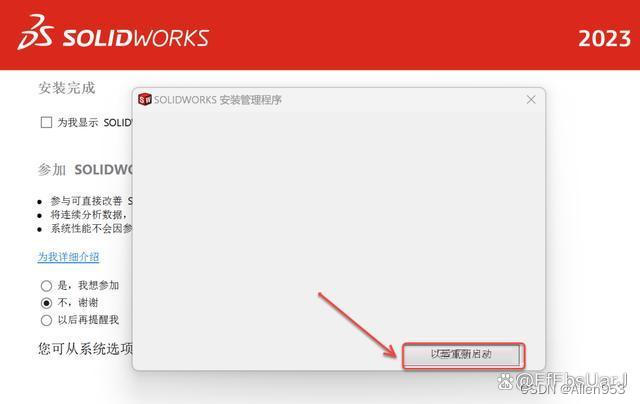
图2-1-31
32.打开安装包解压后的【SolidWorks 2023(64bit)】 文件夹,双击打开【Crack】文件夹。
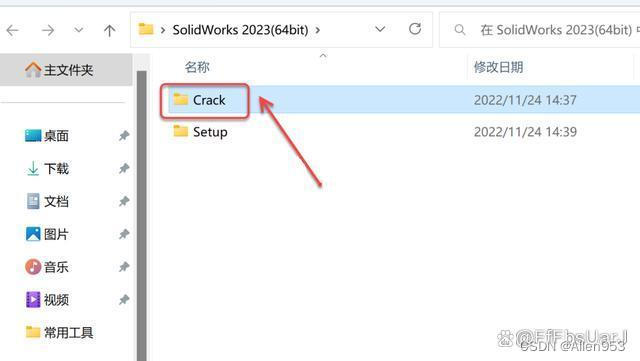
图2-1-32
33.鼠标右击【SOLIDWORKS Corp】文件夹选择【复制】。
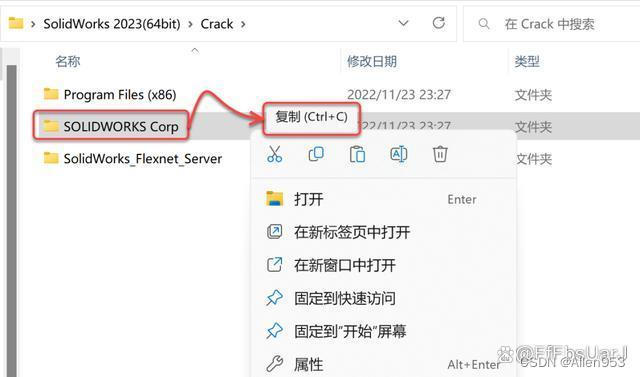
图2-1-33
34.打开步骤22修改的磁盘(如:在步骤22中我将C改为了E,则打开E盘),双击打开【Program Files】文件夹。
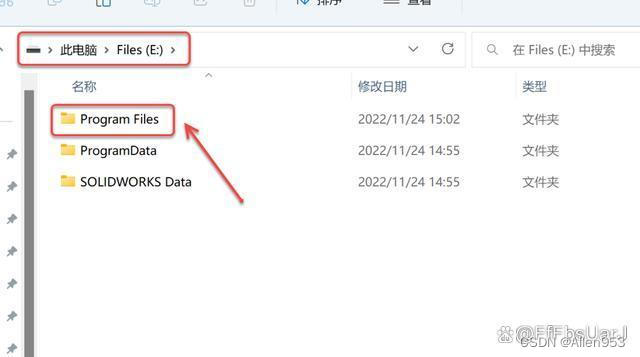
图2-1-34
35.鼠标右击空白处选择【粘贴】。
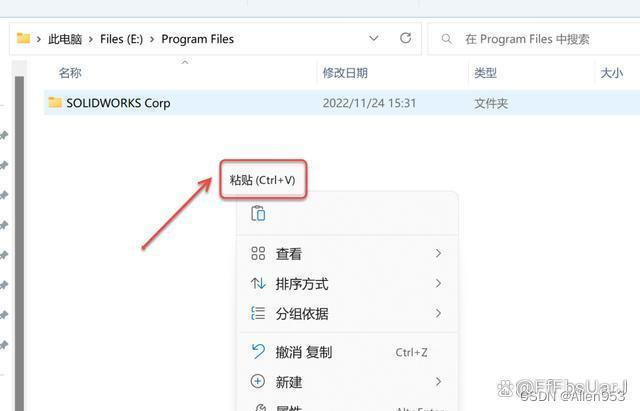
图2-1-35
36.双击桌面【SOLIDWORKS 2023】图标启动软件。

图2-1-36
37.点击【接受】。
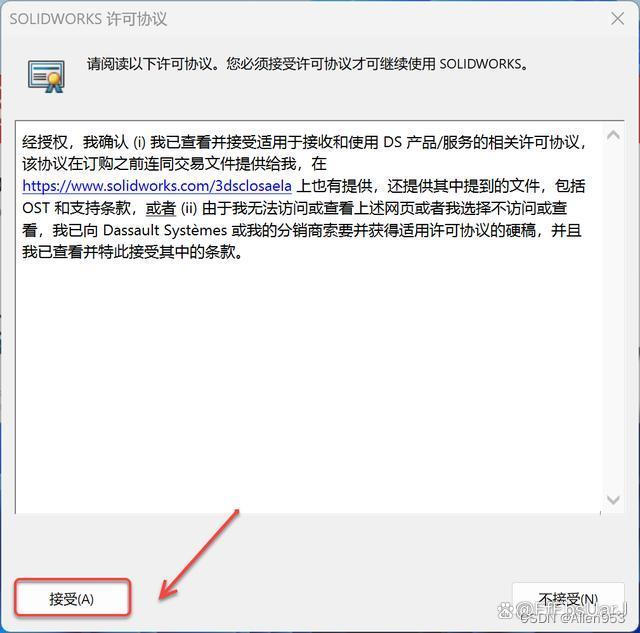
图2-1-37
38.安装成功!
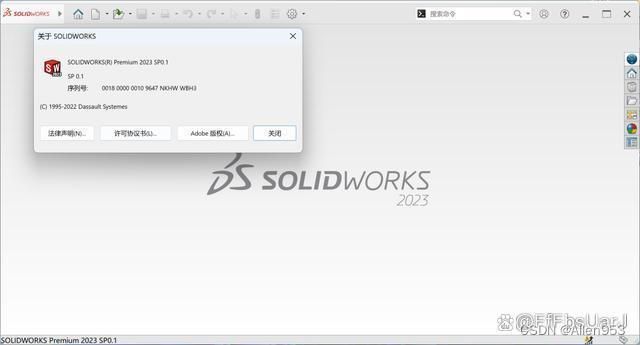
图2-1-38
2.2 用solidworks查看模型并导出3D打印文件
启动solidworks软件之后,点击如下图所示箭头1打开模型:
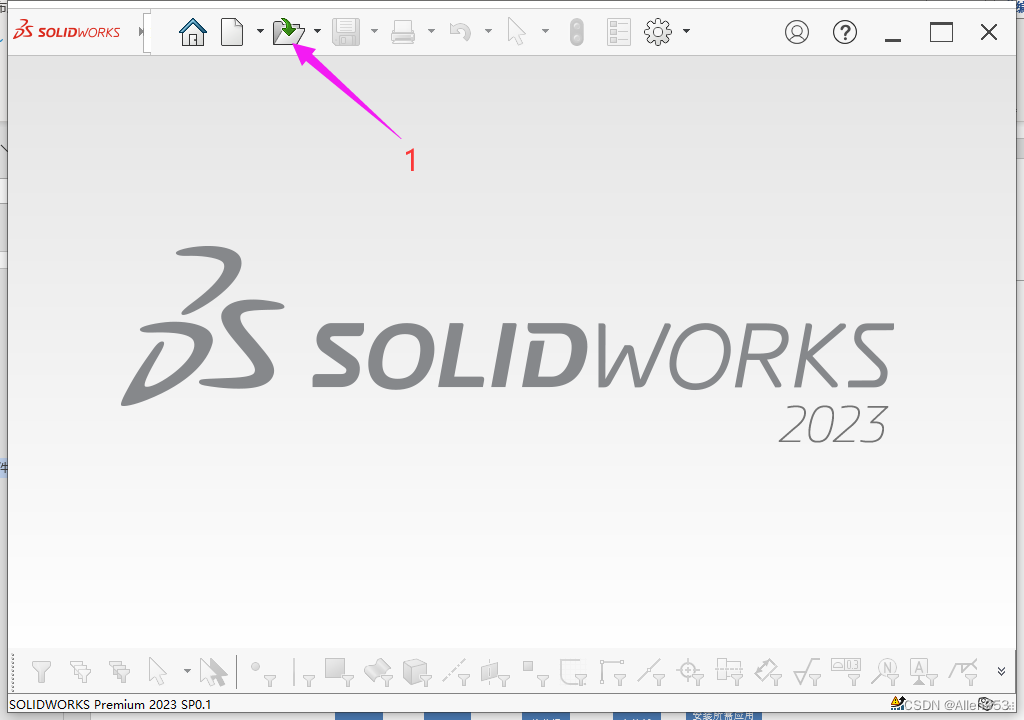
图2-2-1
选择代码仓库里面名字叫”Baize_H1mini.STEP”的文件,如下图箭头所示:
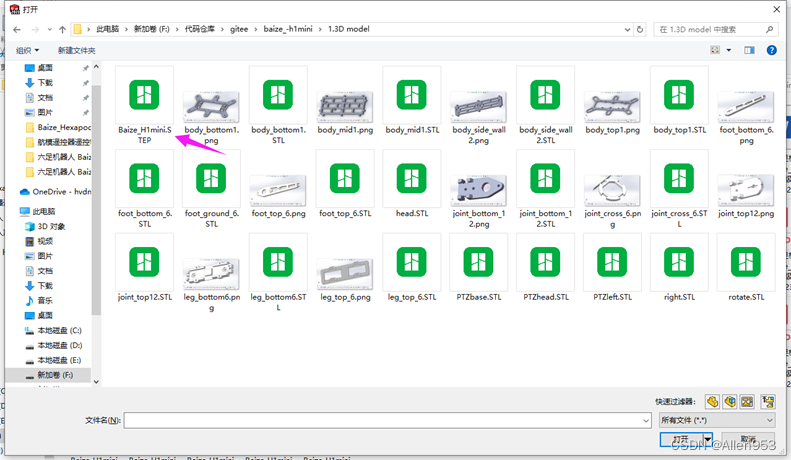
图2-2-2
如下图,正在载入模型
图2-2-3
等待打开完成如下图所示:
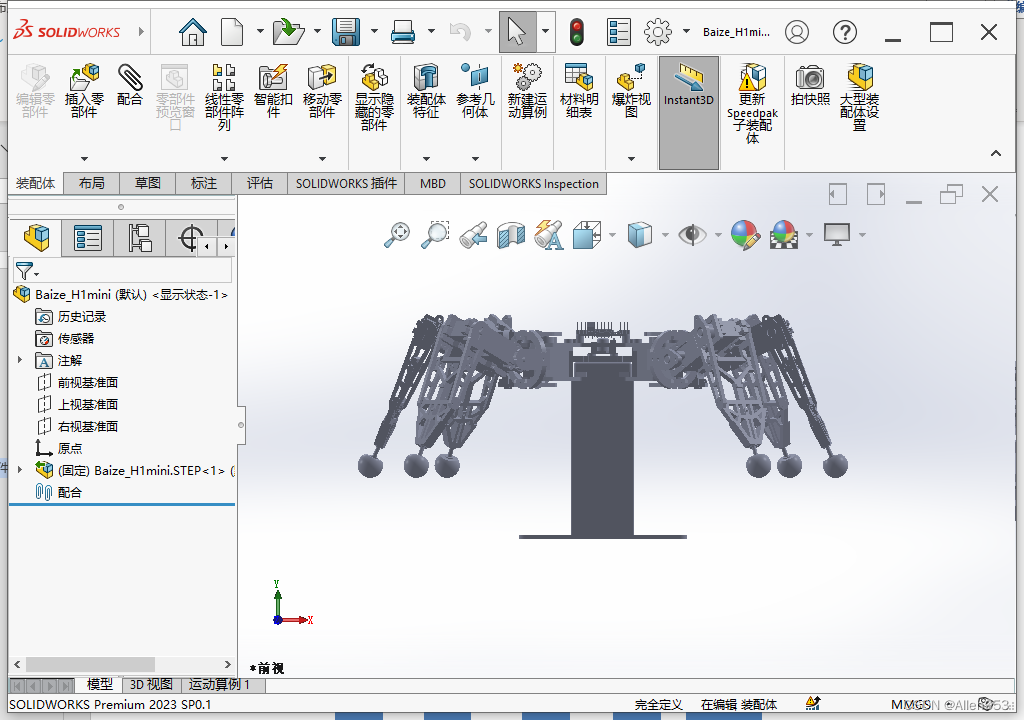
图2-2-4
2.3机械结构零件打印制作
你现在在地图的红色字体位置(走到终点就制作完成了):
重要提示:自己使用打印机打印零件时,对于新手来说大概率会经历由于参数设置问题将零件打废的过程,因此要仔细配置参数确保参数正确。对于需要添加支撑的零件,一定要记得添加支撑。
首先要找到零件的图纸,打开我们刚刚下载的整个项目资料文件夹,找到如下路径1.3D model\Baize_HexapodRobot_Arduino_3DPrinter\STL Files,可以看到该文件夹下有很多可以打印的STL格式图纸,如下图红框中所示:
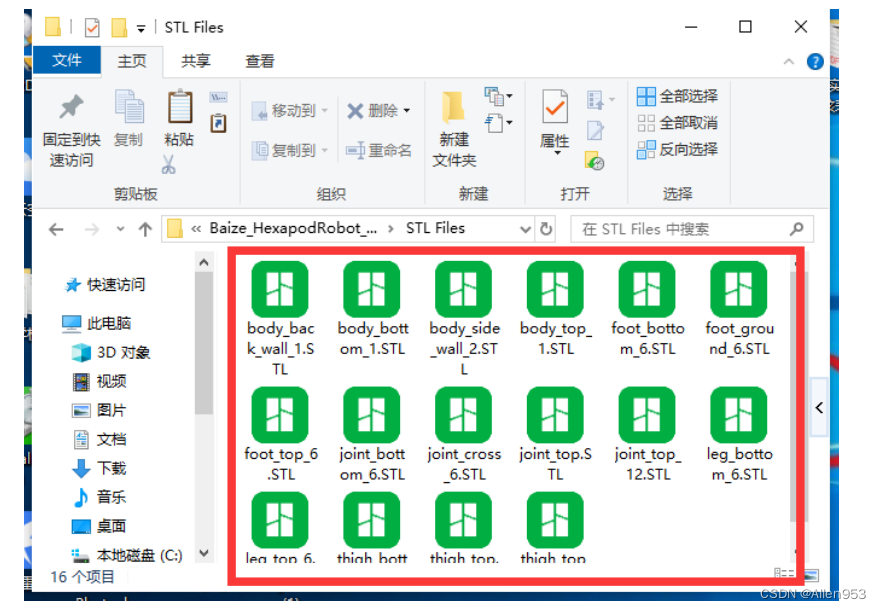
图2-3-5
接下来就可以开始打印了,我这里用的是拓竹P1P型号3D打印机,因此下面的打印教程也是用该款型号打印机制作的,如果你用的其他型号的3D打印机,则可以一次做参考并参照自己3D打印机的说明书进行打印。
下载Bambu Studio:http:bambulab.com/download
登录Bambu Stidio,新建或打开一个项目。

图2-3-6
添加一个模型进行模型切片。
完成模型切片后,选择打印机并发送打印。
打印板类型选择纹理PEI打印板
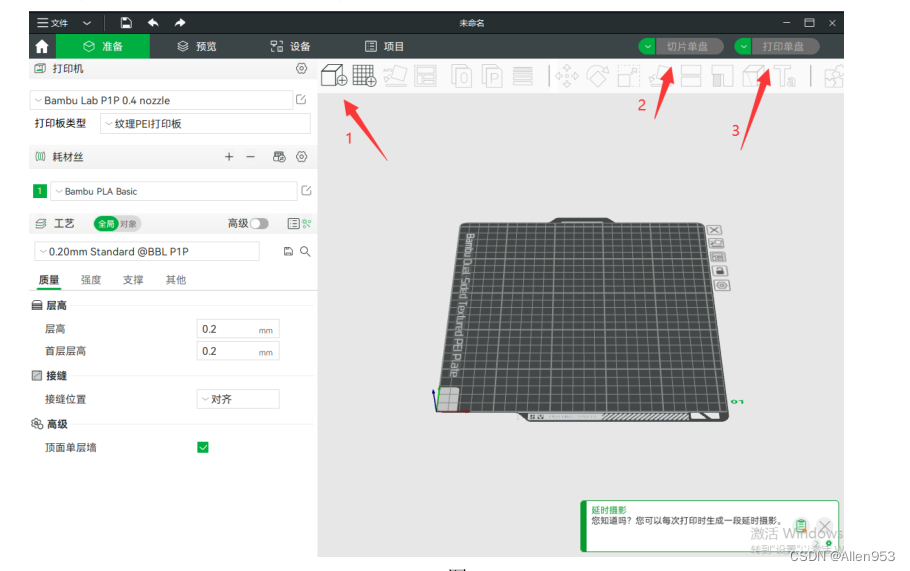
图2-3-7
打印材料是啥? PLA 3D打印材料一般有PLA和ABS两款材料
这里需要选择打印材料,打印机材料一定要选择正确,否则肯定打印失败。
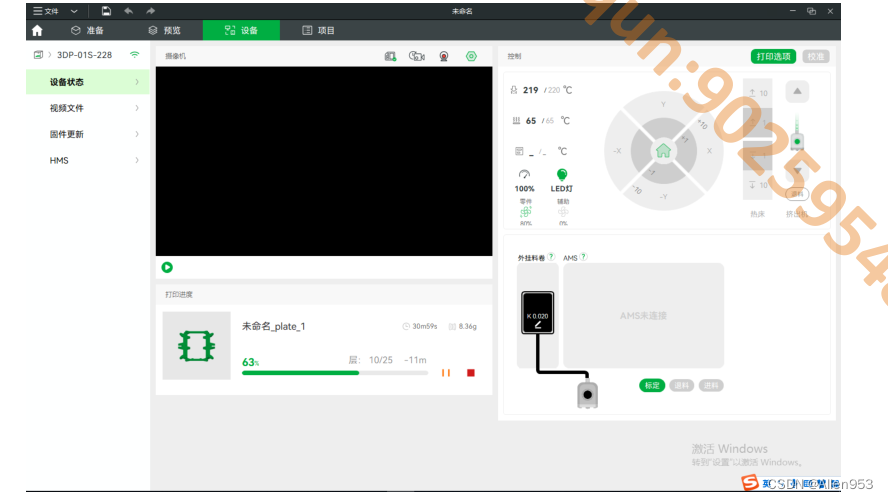
图2-2-8
2.4主控板PCB制作及焊接
百度搜索立创eda
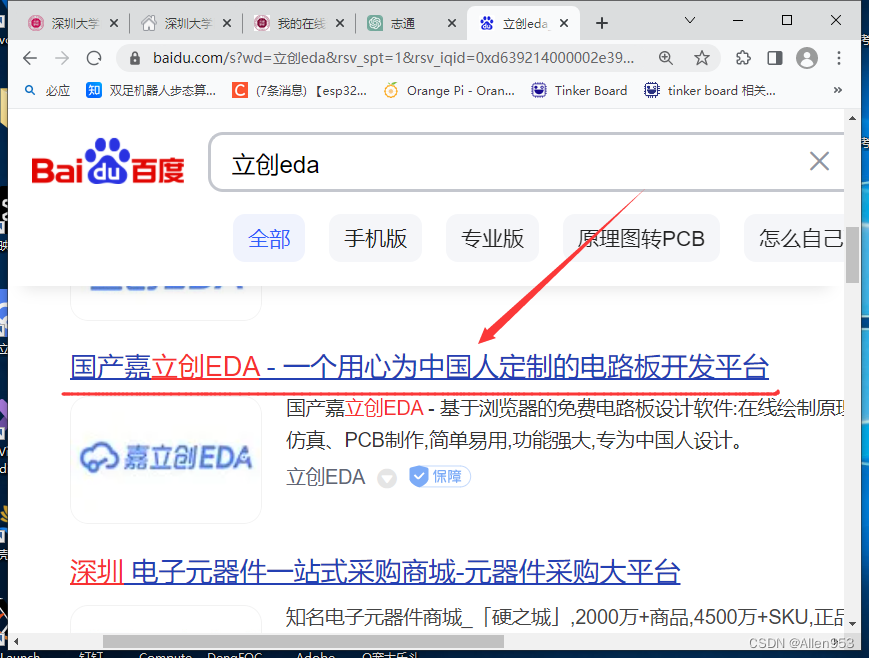
图2-4-1 图2-4-2
打开立创eda,点击文件-打开-嘉立创EDA然后选择我们那个json格式的文件就可以了。
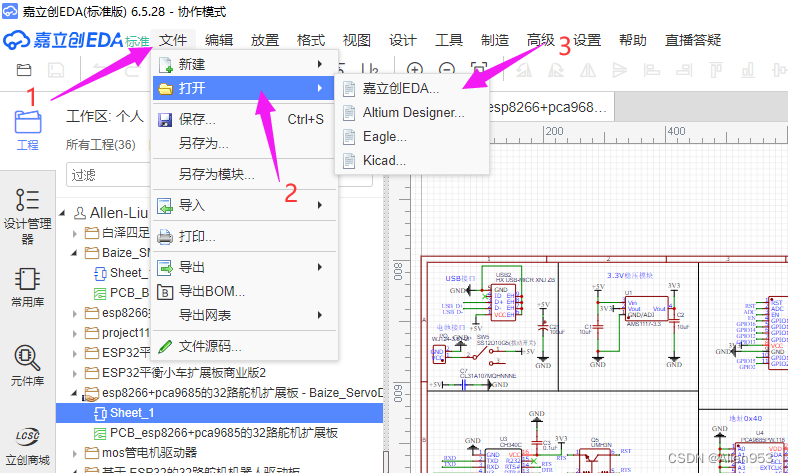
图2-4-3
接着,选择代码仓库里面的两个json格式文件,如下图箭头1,2所示,箭头1所指向文件以SCH开头的是原理图,箭头2以PCB开头的是PCB布线文件。
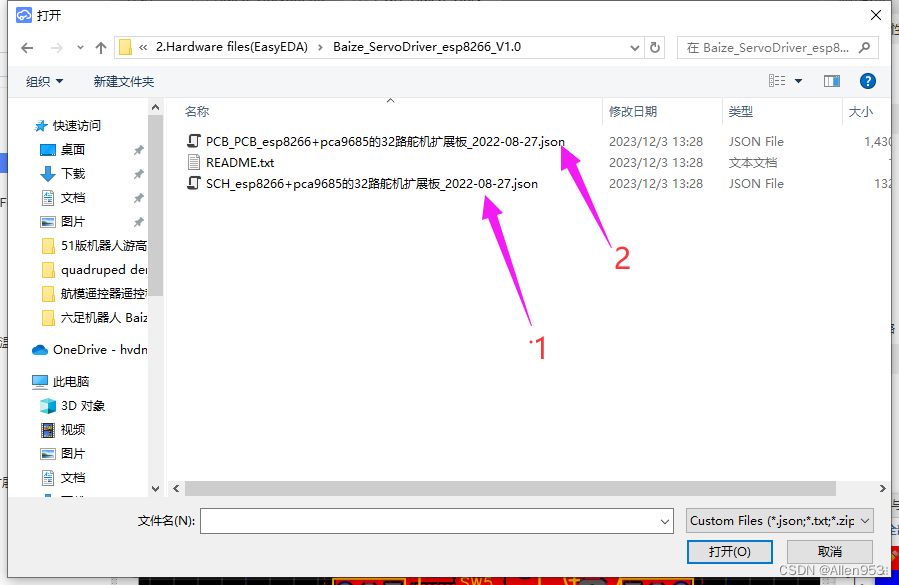
图2-4-4
如果你打开文件之后出现报错信息,请检查立创eda版本,用标准版打开是正确的,用专业版打开文件会出现兼容性问题。
然后就可以在嘉立创打板,嘉立创是提供把我们的设计资料打样出来样板的服务的。
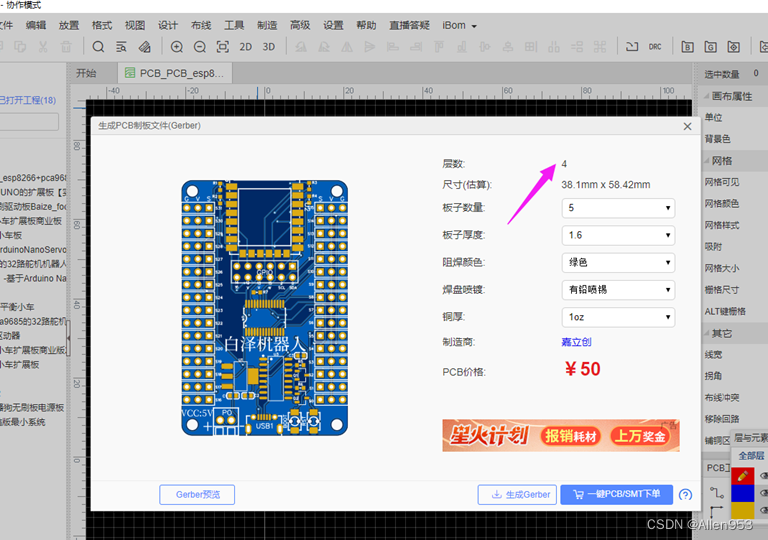
图2-4-5
如下图为嘉立创打板页面,这个1.0版本的是4层板,1.1版本的是2层板:
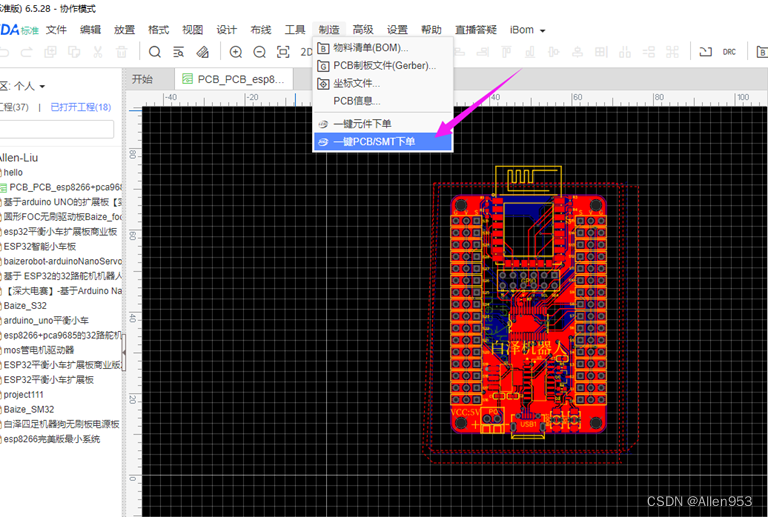
图2-4-6
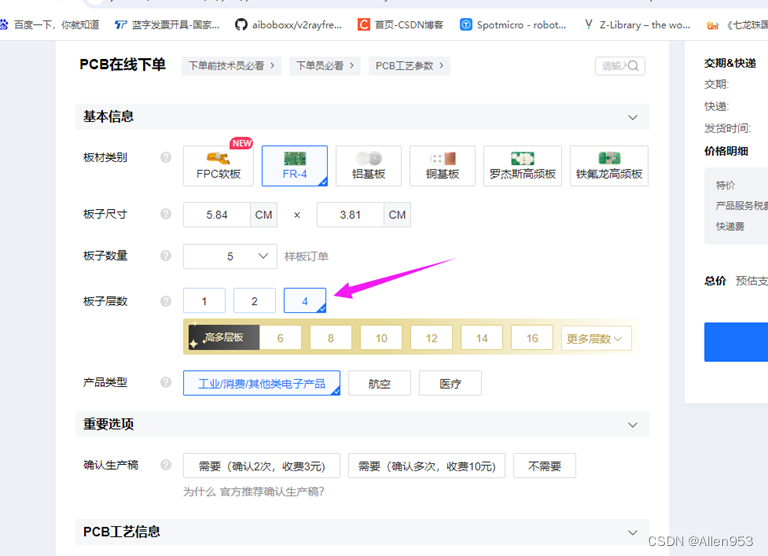
图2-4-7
这些参数大部分都是默认选项,只需要注意几个需要自己选择的选项即可。
打完板子后,嘉立创会快递给你,如下图这个样子:

图2-4-8
最后根据原理图和电子元器件清单,把买到的电子元器件焊接到板子上即可。
如下为板子的元器件清单:
自制主控板(PCB板)电子元器件材料表
| 品名 |
淘宝链接 |
数量 |
| PCA9685芯片 |
点此链接 |
2个 |
| 10kΩ电阻 |
点此链接 |
1块钱100个 |
| ESP-12F模组 |
点此链接 |
1个 |
| 2.54_2x6排针 |
点此链接 |
1个 |
| 复位按钮 |
点此链接 |
2个 |
| 10uF电容 |
点此链接 |
1块钱100个 |
| S8085三极管 |
点此链接 |
2个 |
| AMS1117-3.3压降芯片 |
点此链接 |
1个 |
| CH340C芯片 |
点此链接 |
1个 |
| Micro usb口 |
点此链接 |
1个 |
| 2.54_1x3pin排针 |
点此链接 |
32个 |
| 0.1uF电容 |
点此链接 |
1块钱100个 |
| 电源端子 |
点此链接 |
1个 |
如下为板子原理图:
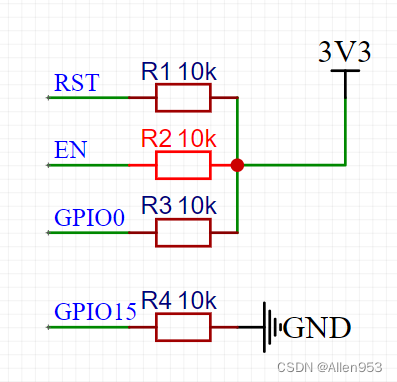
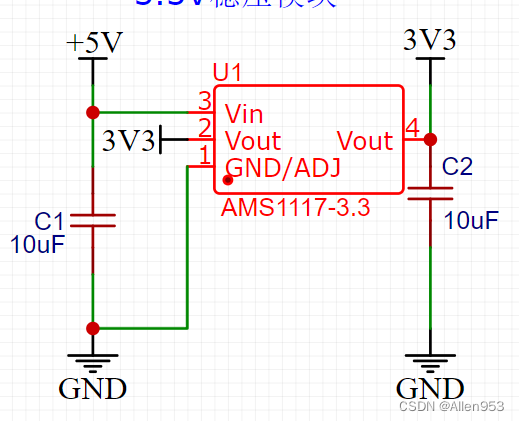
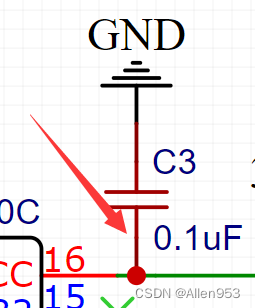
图2-3-8 图2-3-9 图2-3-10
C4和C5都是10uF
R8是10K电阻
2.5 标准件购买(包括螺丝和电器原件等)
你现在在地图的红色字体位置(走到终点就制作完成了):
2.6.1 舵机x18
舵机型号可以用如下两种型号,一种是如图2-5-1左边所示的型号为SG90的蓝色舵机,一种是右边的型号为MG90S的黑色舵机

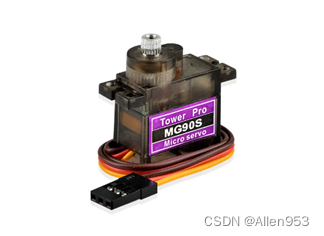
图2-6-1(a) 舵机
如下图为舵机的性能指标

图2-6-1( b )
2.6.2 电池
18650电池通常用于各种设备,如手电筒、笔记本电脑电池、电动工具等。以下是一些关于18650电池的重要信息:
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/116576.html